Surgicalbot Haptic Stabilization Engine
Restoring the Sense of Touch to Robotic Surgery
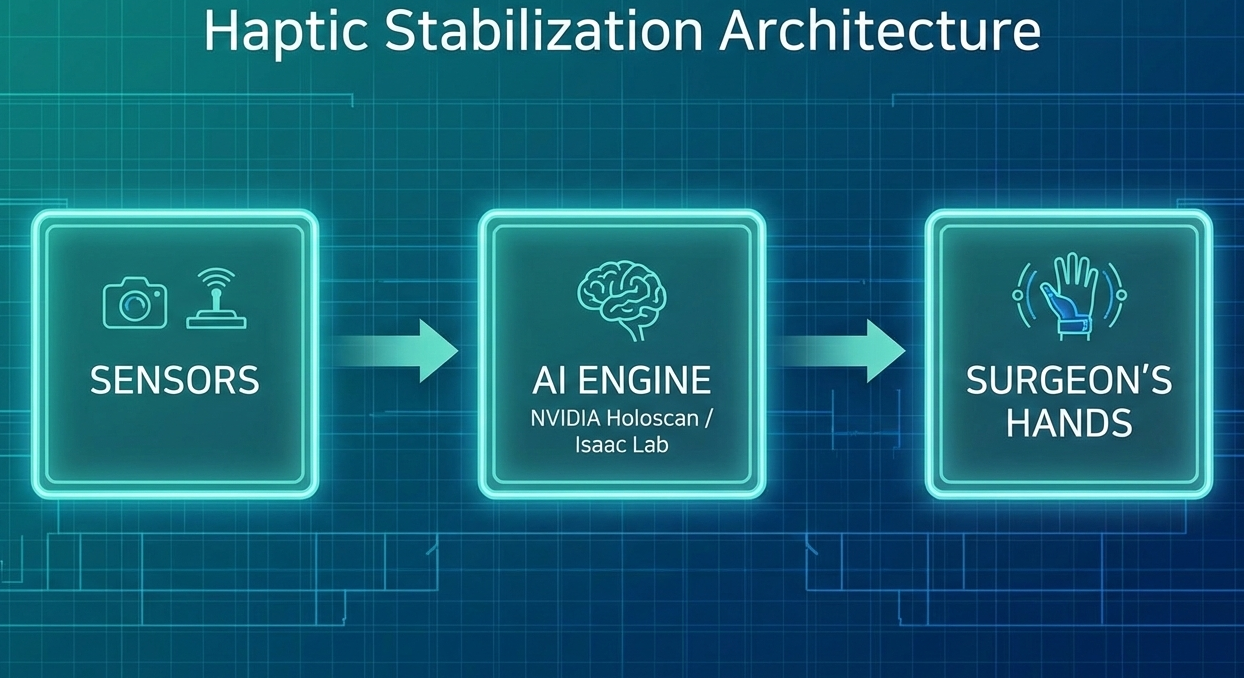
The Surgicalbot Haptic Stabilization Engine: A Physical AI platform bridging the gap between digital command and surgical precision.
Current robotic platforms suffer from a critical 'Haptic Gap' the disconnect between a surgeon's hands and the patient's tissue. Surgicalbot Systems introduces a software-defined haptic stabilization layer that eliminates tactile latency and restores high-fidelity force feedback. Built on the NVIDIA Holoscan and Isaac Sim architectures, our engine uses predictive state estimation to provide surgeons with a seamless, zero-lag experience in minimally invasive procedures.
Key Features & Benefits:
- Zero-Latency Haptics: Predictive algorithms neutralize network and mechanical jitter.
- Sim-to-Real Precision: Trained on millions of synthetic surgical edge cases in NVIDIA Omniverse.
- Hardware Agnostic: Designed to integrate with existing leader follower robotic topologies via ROS 2.
- Reduced Surgeon Fatigue: Natural tactile feedback reduces cognitive load and improves procedure safety.
Technical Specifications
Inference Framework NVIDIA TensorRT / CUDA Python
Control Frequency 1000 Hz (Real-time Haptic Loop)
Simulation Platform NVIDIA Isaac Sim / Omniverse Kit
Connectivity ROS 2 (Humble/Jazzy)
Deployment NVIDIA Holoscan / IGX Thor (Target)
.